
About Me
Hi, I’m Jiajun Hu — a Master’s student in Mechanical Engineering at EPFL. My current work focuses on applying reinforcement learning to quadruped robots, exploring how intelligent control can enable more agile and adaptive locomotion.
I’m deeply interested in robotics and enjoy building systems that bridge theory and real-world applications. Outside of research, I spend my time on photography, Souls-like games, and badminton.
During my undergraduate studies, I was a member of the RoboMaster team, where I worked on both electronics and mechanical design for robotic systems.
Projects
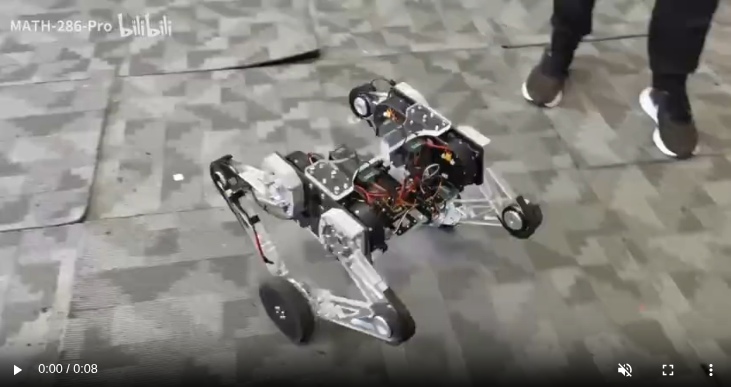
Wheel-Legged Robot Project
Project Documentation Preview, 2024 [README.en]

Publications
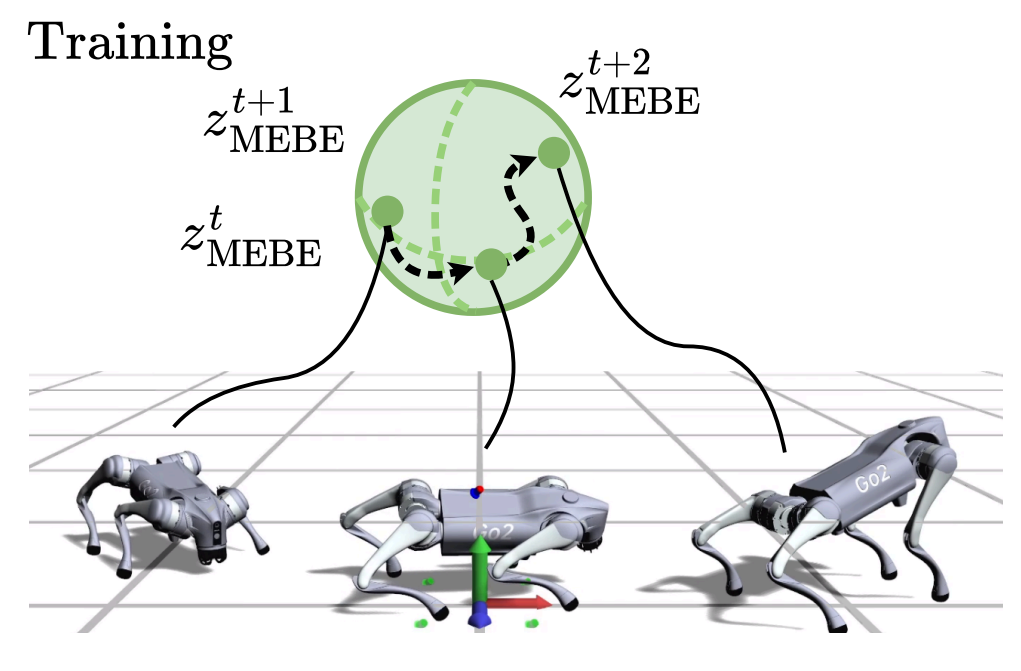
Jiajun Hu, Núria Armengol Urpí, Jin Cheng, Stelian Coros.
In Reinforcement Learning Conference, Under review, 2026 [Arxiv]